欢迎访问四川众兴汽车零部件有限公司的网站
欢迎访问四川众兴汽车零部件有限公司的网站

- 公司名称:四川众兴汽车零部件有限公司
- 联系人:曾先生
- 手机:15828288055
- 公司地址:四川省成都市龙泉驿区经开区南一路55号
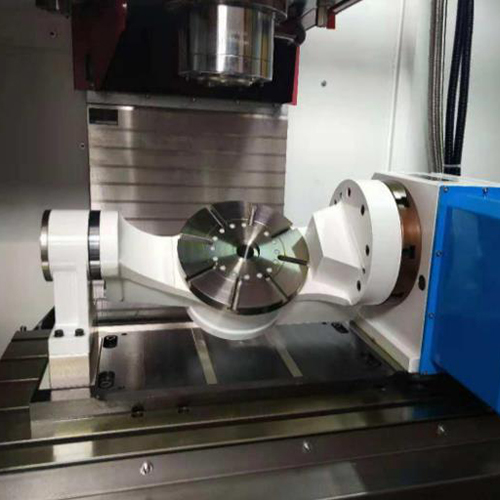
五轴加工




- 产品名称:东北五轴加工公司_四川铣削叶轮五轴加工费用_四川众兴汽车零部件有限公司
- 产品价格:面议
- 产品数量:9999
- 保质/修期:30
- 保质/修期单位:年
- 更新日期:2022-07-31
产品说明
下面小编收集了一些难点和阻力,看是否跟您的情况对应?五轴数控编程抽象、操作困难这是每一个传统数控编程人员都深感头疼的问题.三轴机床只有直线坐标轴,而五轴数控机床结构形式多样;同一段NC代码可以在不同的三轴数控机床上获得同样的加工效果,但某一种五轴机床的NC代码却不能适用于所有类型的五轴机床。数控编程除了直线运动之外,还要协调旋转运动的相关计算,如旋转角度行程检验、非线性误差校核、刀具旋转运动计算等,处理的信息量很大,数控编程极其抽象!
PA的RTCP则是“Real-timeToolCenterPointrotation”前几个单词的缩写。海德汉则将类似的所谓升级技术称为TCPM,即“ToolCentrePointManagement”的缩写,刀具中心点管理!还有的厂家则称类似技术为TCPC,即“ToolCenterPointControl”的缩写,刀具中心点控制!从Fidia的RTCP的字面含义看,假设以手动方式执行RTCP功能,刀具中心点和刀具与工件表面的实际接触点将维持不变,此时刀具中心点落在刀具与工件表面实际接触点处的法线上,而刀柄将围绕刀具中心点旋转,对于球头刀而言,刀具中心点就是数控代码的目标轨迹点!
东北五轴加工公司

这是通俗的说法,并不是规范的说法,一般说来,五轴机床分两种:一种是五轴联动,即五个轴都可以同时联动,另外一种是五轴定位加工,实际上是五轴三联动:即两个旋转轴旋转定位,只有3个轴可以同时联动加工,这种俗称3+2模式的五轴机床,也可以理解为假五轴!发展五轴数控技术的难点及阻力大家早已认识到五轴数控技术的优越性和重要性!但到目前为止,五轴数控技术的应用仍然局限于少数资金雄厚的部门,并且仍然存在尚未解决的难题!
你真的了解五轴加工吗?看完你会恍然大悟.五轴加工(5AxisMachining),顾名思义,数控机床加工的一种模式!采用X、Y、Z、A、B、C中任意5个坐标的线性插补运动,五轴加工所采用的机床通常称为五轴机床或五轴加工中心!可是你真的了解五轴加工吗?五轴技术的发展几十年来,人们普遍认为五轴数控加工技术是加工连续、平滑、复杂曲面的单一手段.一旦人们在设计、制造复杂曲面遇到无法解决的难题,就会求诸五轴加工技术!
四川众兴汽车零部件有限公司在非标零件加工这个行业中,是一家屈指可数的好公司。其主营的产品——五轴加工,更是在业界中受到广大客户的喜爱。
旋转坐标的加入,不但加重了插补运算的负担,而且旋转坐标的微小误差就会大幅度降低加工精度!因此要求控制器有更高的运算精度!五轴机床的运动特性要求伺服驱动系统有很好的动态特性和较大的调速范围。五轴数控的NC程序校验尤为重要要提高机械加工效率,迫切要求淘汰传统的“试切法”校验方式!在五轴数控加工当中,NC程序的校验工作也变得十分重要,因为通常采用五轴数控机床加工的工件价格十分昂贵,而且碰撞是五轴数控加工中的常见问题:刀具切入工件;刀具以更好的速度碰撞到工件;刀具和机床、夹具及其他加工范围内的设备相碰撞;机床上的移动件和固定件或工件相碰撞。
四川众兴汽车零部件有限公司坐落于四川省成都市龙泉驿区经开区南一路55号,是四川成都龙泉驿区知名企业,公司业务联系人先生:15828288055, 期待您的来电咨询更多关于五轴加工相关信息!
上次金属加工小编发的关于“东芝机床事件”就是基于这个制度!但是,哈哈,又但是了.五轴数控加工由于干涉和刀具在加工空间的位姿控制,其数控编程、数控系统和机床结构远比三轴机床复杂得多.所以,五轴说起来容易,真实实现真的很难。另外要操作运用好真的更难!与三轴联动的数控加工相比,从工艺和编程的角度来看,对复杂曲面采用五轴数控加工有以下优点:提高加工质量和效率扩大工艺范围满足复合化发展新方向小编因此也咨询了行业的专家,简而言之,真五轴即五轴五联动,假五轴有可能是五轴三联动,另外两轴只起到定位功能.
以圆柱铣刀进行接触成形铣削时,需要对不同直径的刀具编制不同的程序!目前流行的CNC系统均无法完成刀具半径补偿,因为ISO文件中没有提供足够的数据对刀具位置进行重新计算。用户在进行数控加工时需要频繁换刀或调整刀具的确切尺寸,按照正常的处理程序,刀具轨迹应送回CAM系统重新进行计算!从而导致整个加工过程效率十分低下!RTCP,解释一下,Fidia的RTCP是“RotationalToolCenterPoint”的缩写,字面意思是“旋转刀具中心”,业内往往会稍加转义为“围绕刀具中心转”,也有一些人直译为“旋转刀具中心编程”,其实这只是RTCP的结果! 光电探头安装在机器人底盘前部,共设置了5个检测点。从理论上讲,检测点越多、越密,识别的准确性与可靠性就越高,但是硬件的开销与软件的复杂程度也相应的增加。采用该巡线系统保证了检测的精确度,节约了硬件的开销。发光二极管发出的调制光经地面反射到光敏二极管。光敏二极管产生的光电流随反射光的强弱而线性变化。把这种变化检测出来,就可以判断某一个检测点是否在白色引导线的上方,从而判断机器人和白色引导线的相对位置。
供应商信息